
Naukowy Michigan Kołowy przetwornik impulsowy o wysokiej rozdzielczości (WPT) to koder optyczny, który mocuje się do nakrętek lug koła pojazdu. WPT jest powszechnie używany do śledzenia pozycji i prędkości pojazdu w zastosowaniach takich jak zarządzanie flotą i śledzenie pojazdów autonomicznych. To studium przypadku zademonstruje dokładność użycia dwóch przetworników impulsów kołowych razem, porównując pomiary pozycji i prędkości z danymi GPS.
Jak to działa
Sygnał z enkodera służy do obliczenia położenia kątowego i prędkości koła. Dane zarejestrowane przez dwa WPT po obu stronach samochodu można uśrednić, aby znaleźć środek, dając w ten sposób najdokładniejsze przedstawienie odległości i prędkości, jaką przebył samochód. Pojazdy mapujące często wykorzystują WPT, aby zrekompensować przerwy w sygnale GPS, umożliwiając śledzenie odległości przebytej podczas utraty sygnału. W tym badaniu wysoka rozdzielczość danych WPT działała znacznie lepiej niż czujnik GPS, który został użyty ze względu na wysoką częstotliwość próbkowania 10,000 XNUMX Hz.
Konfiguracja testowa
Aby porównać wyniki z Wheel Pulse Transducer z wynikami GPS, do pojazdu podłączono dwa systemy WPT, jeden z tyłu po prawej stronie, a drugi z tyłu po lewej stronie. Przetworniki zamontowano na tylnych kołach, aby ruch skrętny przednich kół nie musiał być kompensowany w danych. Na dachu pojazdu, na środku dachu nad tylnymi kołami, umieszczono urządzenie GPS, które dałoby najdokładniejszy odczyt. Odległości i prędkości lewego i prawego WPT zostały uśrednione, aby dopasować je do sygnału GPS w środku pojazdu. Przedstawiony poniżej kilometrowy kurs, wraz z wykresem szerokości i długości geograficznej z GPS, obejmuje manewr okrężny i zygzakowaty.
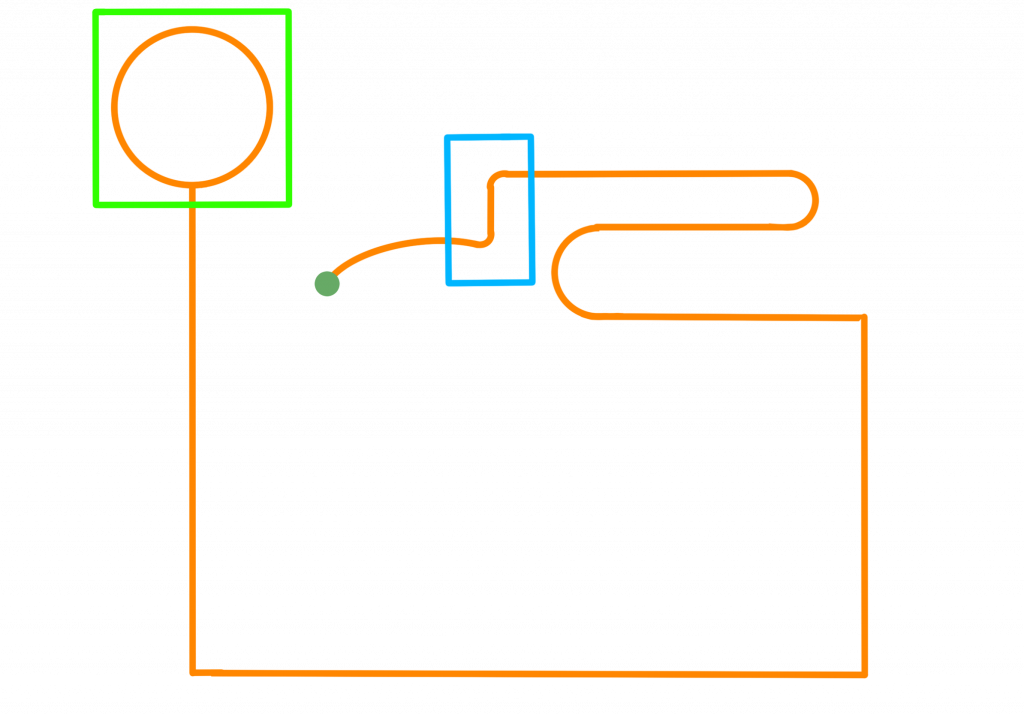
Zarys ścieżki testowej
Dane GPS ze ścieżki testowej
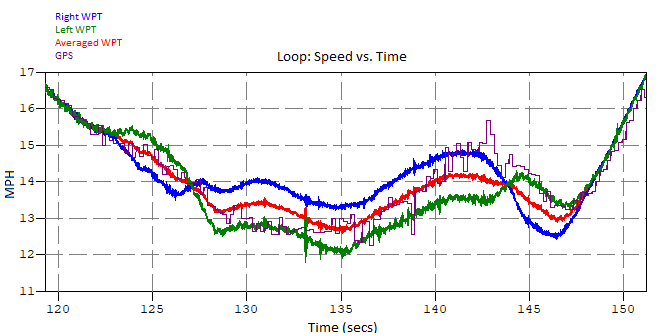
Pętla
Jadąc w kierunku przeciwnym do ruchu wskazówek zegara wokół okrągłej części toru testowego (pokazanej na zielono powyżej), można by oczekiwać, że prędkość i odległość prawego koła będą mierzone znacznie wyżej niż lewego. Patrząc na dane pokazane poniżej, okazuje się, że to prawda. Prędkości prawego (niebieskiego) i lewego (zielonego) koła są uśredniane (czerwony) i prawie idealnie pokrywają się z danymi GPS (fioletowy).
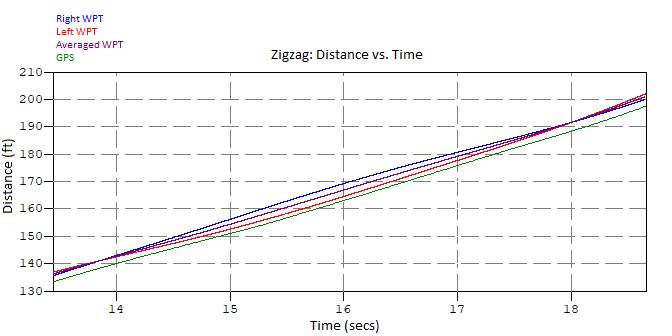
Ścieżka zygzakowata
Obszar zawierający szybki skręt w prawo iw lewo, pokazany w niebieskim kwadracie na obrysie toru testowego, zapewnia kolejną interesującą perspektywę. Na poniższym wykresie prędkości pojazdem manewrowano, wykonując szybki skręt w lewo, a następnie natychmiast w prawo. Utworzony w ten sposób kształt „W” pokazuje, że lewe koło (fioletowe) poruszało się wolniej niż prawe (zielone) wokół zakrętu w lewo, a następnie lewe poruszało się szybciej niż prawe wokół zakrętu prawego. Podczas gdy dwie przeciwne strony zamieniają się miejscami podczas manewru, obliczona średnia (czerwona) i dane GPS (niebieskie) pozostają blisko siebie pośrodku.
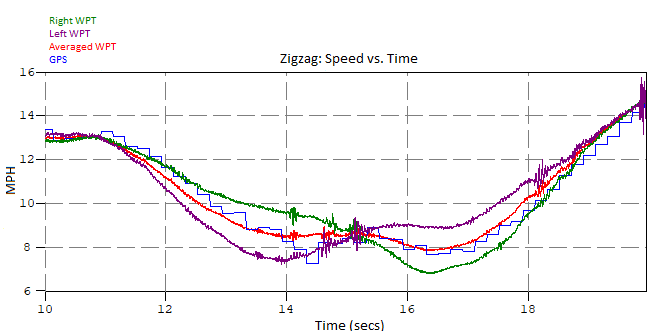
Czas pomiędzy dwoma punktami przecięcia na poniższym wykresie to czas, w którym nastąpił skręt w lewo iw prawo. Prawe koło (niebieskie) przewyższa lewe koło (czerwone) pod względem przebytej odległości, ponieważ ma większy promień obrotu podczas skrętu w lewo, który zaczyna się około 14 sekund i kończy około 15.5 sekundy. W tym momencie prawe koło przejechało dalej niż lewe. Prawy skręt zaczyna się tuż przed 17 sekundami, a lewe koło dogania prawe koło około 18 sekund. Średnia (fioletowa) przebyta odległość pozostaje wyśrodkowana między tymi dwoma. Ponieważ nachylenie średniej odległości i GPS są takie same, nadal rejestrują tę samą prędkość i zmianę odległości. Jednak GPS pozostaje o kilka stóp za kierownicą, stąd niewielkie przesunięcie w danych.
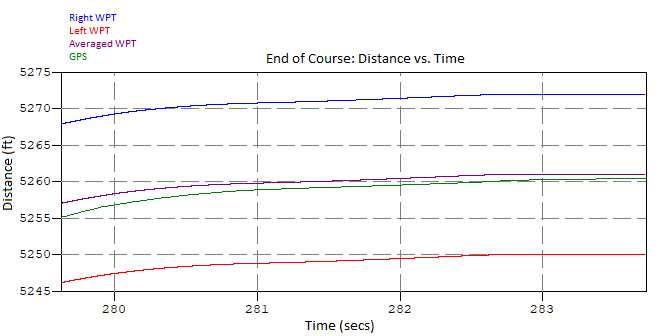
Błąd
Kilka ostatnich punktów danych testu może pokazać korzyści płynące z używania dwóch WPT zamiast tylko jednego. Gdyby użyto tylko jednego WPT, zarejestrowane odległości miałyby maksymalny błąd 0.22%. Jednak po zainstalowaniu dwóch WPT i uśrednieniu ich, błąd wynosi tylko 0.0115%, co oznacza zmniejszenie o współczynnik 19. Pokazuje to, że użycie dwóch przetworników impulsowych koła może pomóc w zmniejszeniu błędu, który może narastać podczas wielu obrotów.
Ten test jest tylko jednym z wielu różnych testów, w których wykorzystuje się kołowe przetworniki impulsowe. Posiadanie trwałego i precyzyjnego systemu pomiarowego jest korzystne dla dokładnego śledzenia pozycji i prędkości pojazdu w każdym środowisku. Jeśli chcesz omówić swoją aplikację do testowania kół, skontaktuj się z przedstawicielem Michigan Scientific dzisiaj.